HyBIS
The control unit, which is set up in the main lab of the ship, looks like a bit of kit from James Bond's Q-branch: a flight case that opens up to reveal four video monitors inside the lid, and the electronics for flying the vehicle. Two small joysticks - one for each thruster - control the vehicle on the seafloor, thousands of metres below.

The video feeds from the cameras can be piped to other large monitors around the lab, so that members of the scientific team can watch the action on the seafloor without distracting the pilot. For this expedition, the pilots will be Bramley Murton and Veit Huhnerbach - though other members of the team are always eager to have a go if allowed!
During its first dives in 2008, HyBIS rescued an item of oceanographic equipment called a benthic lander from 1700 metres deep near the Canary Islands. To prepare for our deep dives in the Cayman Trough, HyBIS completed ten dives over the Casablanca Seamount, an underwater mountain 300 miles west of Morocco, in October 2009. The deepest dive was to 4630 metres.
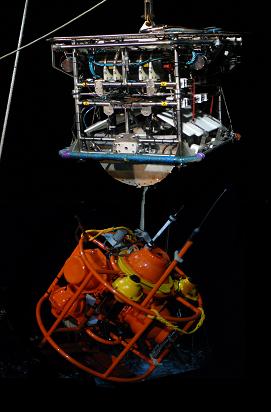
Not having expensive buoyancy materials and vertical thrusters makes HyBIS much cheaper to build and operate than a conventional ROV. Manoeuverable, non-floating platforms like HyBIS have been widely used in the offshore industry, but are a new concept for deep ocean science.
Traditional ROVs, such as the UK's deep-diving vehicle Isis, offer superb performance, rather like a sports car. But like sports cars, they are expensive to run. HyBIS is rather like a town runabout: not the same high performance, but much cheaper to run, and therefore ideal for just popping to the shops. For the initial reconnaissance of deep-sea vents on this expedition, we are 'just popping to the shops' - and we will return with the Isis ROV in a second expedition.
Page 1: HyBIS concept and design
Page 2: HyBIS track record
Want to dive deeper?
Download the technical specifications for HyBIS
Read about the HyBIS test dives exploring the Casablanca Seamount
Technology
Take a tour of our research ship and our undersea vehicles, sensors and systems for exploring the ocean floor.
What are we using?